16-887: Robotic Caregivers and Intelligent Physical Collaboration (Spring 2023)
Course Info
Syllabus
Course Schedule
Course Project Statement
Midterm Presentation Grading Rubric
Final Presentation Grading Rubric
Final Report Grading Rubric
Time: Monday & Wednesday 12:30 - 1:50 PM
Location: NSH 3002
Instructor: Zackory Erickson
Office Hours: Wednesday 1:50 - 2:30 PM
Course Questions and Discussion: Slack – Registered students will be added
Final Projects
Food Basket Delivery with the Stretch
[Presentation PDF] [Project Report]


CPU: Clothing Picker Upper

Stretch RE1 Voice Control
Course Description
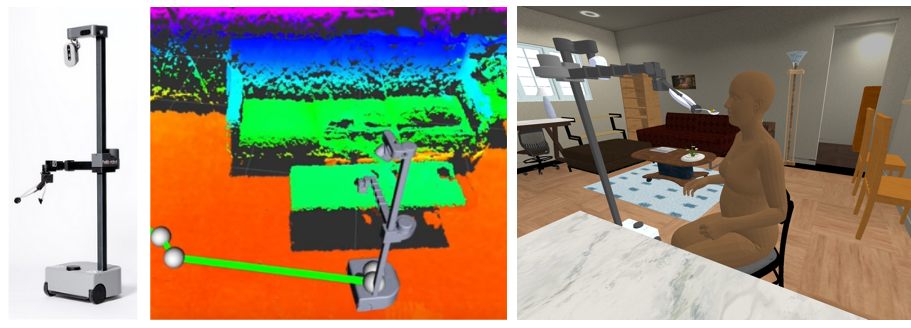
Robotics researchers and futurists have long dreamed of robots that can serve as caregivers. In this project-based course, you’ll learn about intelligent physical human-robot collaboration and opportunities for robots that contribute to caregiving. You’ll gain hands-on experience with teleoperation, autonomy, perception, navigation, manipulation, human-robot interaction, and machine learning. You’ll also learn about robot design, collaborative research, and healthcare robotics.
This is a graduate-level project-based course for students interested in physical human-robot collaboration and robotic caregiving. There are no exams nor textbook assignments. You will be working with a group of your peers to develop solutions to real-world problems in which robots physically interact with and assist people. There are two projects where you will work with a real mobile manipulator and build on state-of-the-art methods from scientific literature, all leading to a live robot demonstration, presentation, and short paper to disseminate your results.
Pre-Requisites
Prior experience with the Python programming language is encouraged and extremely beneficial.
History and Example Projects
Examples of past robotic caregiving projects can be found on the following course webpage: 16-887: Robotic Caregivers and Intelligent Physical Collaboration (2022)
Credit
Earlier versions of this course were co-developed and co-instructed with Prof. Charlie Kemp at Georgia Tech. An adaptation of this course, Robotic Caregivers, is still taught at Georgia Tech (as of Spring 2023).